お久しぶりです。ずいぶん時間がかかってしまいましたが、ドローン製作の続きを書いていきます。今回はモーターを動かして浮力がどこまで得られるか確認した内容を載せます。
確認の目的
目的は以下の通りです。
- モーターをESCを通して動かせるかどうか
- ドローンとして組立た時、浮かせる力があるのかどうか
以上を確認するために行ってます。
組立ができても動かせなきゃ意味ないですし、また、飛ばなければドローンでは無いですもんね笑
確認方法
以下の方法で行っていきます。
- 浮力の測定方法
- 動作回路
- 制御方法
順番に説明していきます。
1.浮力の測定方法
浮力の測定は以下の用に定義します。
浮力 = ①非駆動時の重量 ー(②駆動時の重量 ー ③風圧による重量)
①、②、③それぞれの状態を測定するイメージを図を貼り付けておきます。
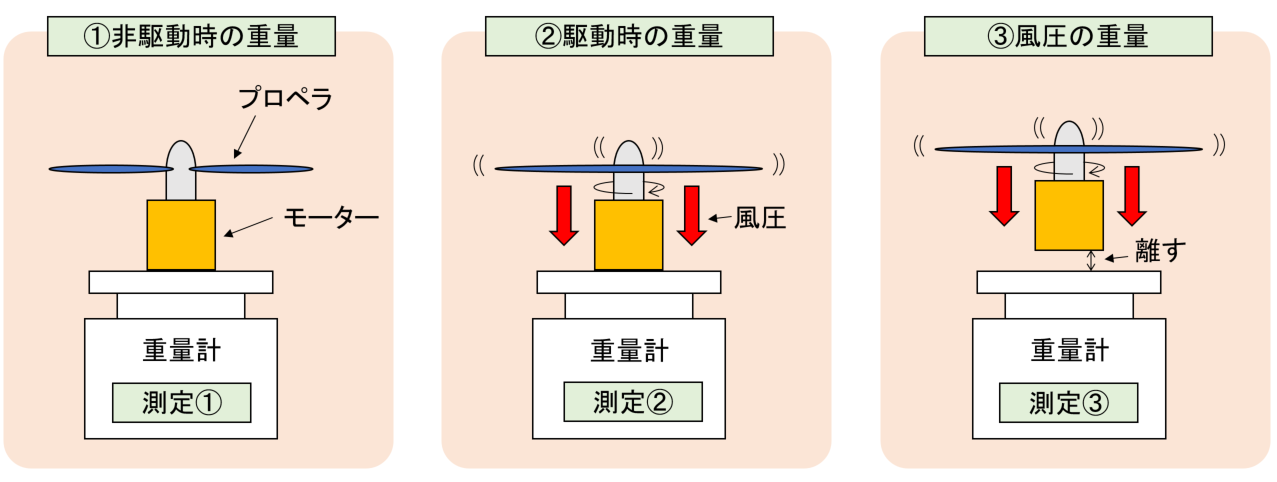
①ー②でもある程度軽くなるので、その分モーターが浮力を生み出していると思うのですが、実際は押しのけた空気の圧力が重量計を押すことで、浮力分も重量として出てしまいます。
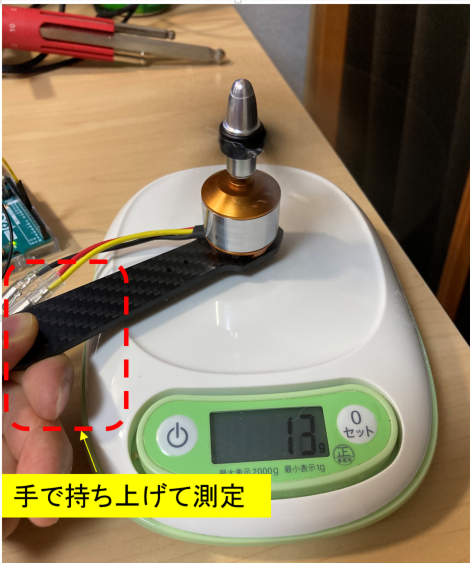
そこで③のようにモーターを少し持ち上げ、風圧のみ重量計にかかるように測定します。実際に測定した様子の写真を載せておきます。写真では13gの風圧が測定できてます。
2.動作回路
動作回路は前回のブログと少し変更しました。変更点は、
- 電源
- モーター
です。
前回ブログは以下の通り。
まず電源ですが、
9Vの乾電池を使用してましたが、試しているうちに1A以上流すことができないことがわかりました。この乾電池は過電流の防止素子が組み込まれているようで、1A以上流すことができませんでした。
そこで、いい機会なので、安定化電源を購入してしまいました。これで、電流も電圧も調整し放題です。ということで電源は安定化電源に変更しました。

次に、モーターについて、
モーターは変更というより追加です。以下2種類のモーターで測定しました。
- A2212/13T 1000KV
- A2212/6T 2200KV
追加した理由は後程説明しますが、違いは巻き数『T』と回転速度『KV』です。巻き数が多いと電線が細くなり抵抗大→低速回転 とのことで、巻き数が小さい方が抵抗小→高速回転 となるようです。
3.制御方法
前回のブログでArduinoを使って、PWM制御を行うと説明したと思います。似たようにブラシレスモーターの制御を行っているブログを見つけて参考にしました。
こちらのブログ私と同様にドローンの製作もやっているようでとても参考になります。
このブログのようにarduinoのスケッチを作成し、PWM制御します。詳細のPGは別の回にでも説明します。
結果
それでは浮力測定の結果(グラフ)を載せます。
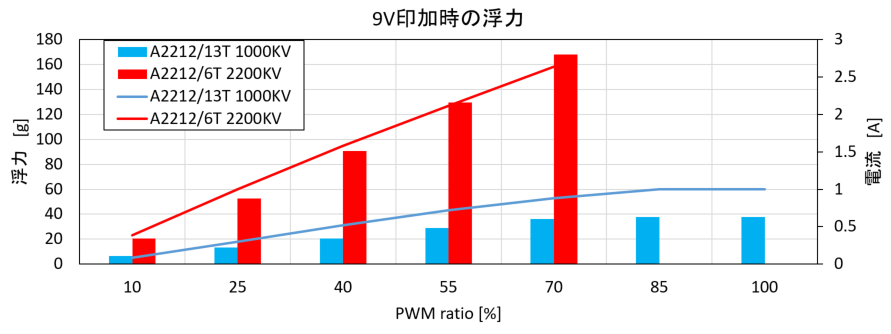
折れ線グラフ:浮力g(第1軸) 棒グラフ:電流A(第2軸)
A2212/6TのモーターはPWM70超えはパワーが強すぎて危なそうなのでやめました笑
最終のドローン重量は400g想定 かつ クアッドコプターにする予定なので、A2212/6Tのモーターなら十分なパワーが得られそうです。逆にA2212/13Tではパワー不足であることがわかりました。(モーターを追加した理由はこれです。笑)
第2軸にあるように電流も計測し、相関も確認しました。巻き数『T』が小さいと電流値が大きくなり、得られるパワーが大きいことも確認できました。
次回以降やること
次回はArduinoのPWMスケッチを説明しようと思います。
その他以下をやっていかなければと思ってまして、
- 加速度センサの使い方勉強
- 電源配置などドローン上の回路作成
- PID制御によるホバリング
- Bluetoothを活用したコントロール方法勉強
特に計画も立てて無いですが、勉強してわかったことを記述しながら進めていきたいです。
補足
横軸に電流値、縦軸を浮力としたグラフも載せておきます。
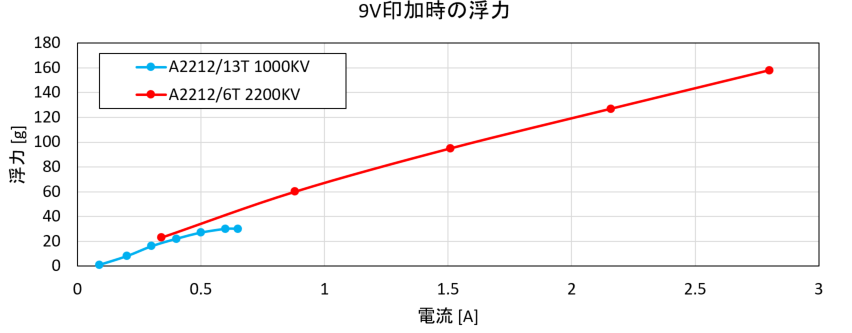
○点はPWM値10%,25%,40%,55%,70%,85%(※),100%(※)を示してます。※A2212/13Tのみ
こうやって見ると2つのモーターは一つの直線に近似してそうですよね。
モーターの特性はおそらく同じだけど以下の事が言えるのかと思いました。
- 巻き数の多い A2212/13T は最大出力は小さいが、PWMで細かい制御が可能
- 巻き数の少ない A2212/6T は最大出力が大きく、幅広い動きが可能だが制御は困難
少し面白かったので掲載しておきます。


コメント