前回モーターの駆動まで行うと書きましたが、
色々やることが多いので、その準備編としてモーターを動かす回路製作までを書いておきます。
準備物
- ブラシレスモーター
- ESC(スピードコントローラー、アンプ)
- 電源
- マイコン(PWM信号用)
- 配線材
- コネクタ・接続部品等
- 圧着工具(圧着端子を活用する場合)
以上です。今回、はんだこては使ってません。
回路図の設計
回路図は以下の通りですね。
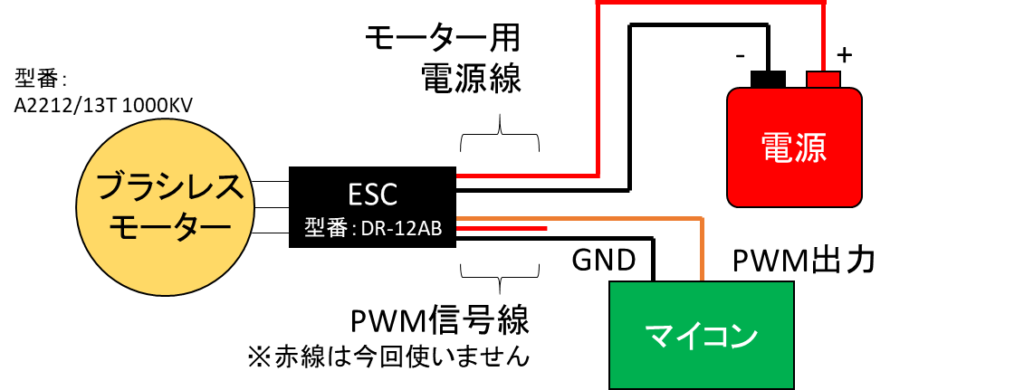
ブラシレスモーターは通常のブラシDCモーターとは違い、3本の配線に交互に電気を流すことで回転することができます。ブラシが無く、摩耗しないので耐久性が高いことがメリットです。
ESCはブラシレスモーターに交互に電気を流すことができ、また、マイコンからのPWM信号で出力を調整してくれます。
電源はモーターとESCを起動させるために必要です。回路図に記述してませんでしたが、マイコンにも電源が必要です。今回はPCからUSBでとってます。
ESCから出ている赤線はBECと言って5Vの電源線です。これをマイコンにつなげれるならそれでもいいと思います。
各部品の接続方法
色々な方法があると思います。そこで今回は複数の方法で接続しました。
○ブラシレスモーター ~ ESC の接続
ここではギボシ端子という部品を使ってみました。

電線の被覆剥ぎの工具と圧着工具が必要です。
また、電源側にメス端子、モーター側にオス端子を接続した方が安全のようです。
○ESC ~ 電源 の接続
ホームセンターで以下のワンタッチコネクタを見つけて購入しました。これなら、圧着やはんだ付けしなくていいので実験レベルなら簡単ですね。
![[商品価格に関しましては、リンクが作成された時点と現時点で情報が変更されている場合がございます。]](https://hbb.afl.rakuten.co.jp/hgb/1d104539.ffe3f652.1d10453a.d1b9d74c/?me_id=1346406&item_id=10002698&pc=https%3A%2F%2Fthumbnail.image.rakuten.co.jp%2F%400_mall%2Fdenzai1%2Fcabinet%2Fmem_item%2Fimgrc0071964153.jpg%3F_ex%3D240x240&s=240x240&t=picttext "[商品価格に関しましては、リンクが作成された時点と現時点で情報が変更されている場合がございます。]")

また、電源についてですが、今回は9Vの電池とコネクタを購入。
https://www.amazon.co.jp/gp/product/B07S8WH8CC/ref=ppx_yo_dt_b_asin_title_o07_s00?ie=UTF8&psc=1
https://www.amazon.co.jp/gp/product/B01GYEP0W8/ref=ppx_yo_dt_b_asin_title_o07_s00?ie=UTF8&psc=1
コネクタの端子は切断・被覆を剥いでからワンタッチコネクタで接続してます。
実際ドローンで飛ばすときは、li-poバッテリーにしなくてはならないと思うので、電池は別途検討しなきゃですね。
電池は過電流防止装置のようなものがついており、1A以上流すことができませんでしたので、安定化電源に変更してます。以下リンク参照(※12/19追記)

○ESC ~ マイコン の接続
ESCのマイコン用の接続には、Qiコネクタ(メス)がついてました。
なのでジャンパー線で接続しました。
またマイコンは、家にあった arduino uno を使用してます。arduinoは色んな人が使っているので、使い方やソースコードなどもネットに落ちてますのでお勧めのマイコンです。

PWM出力が可能なピンは限られており、マイコンによって違います。以下リンクにunoのPWMピンについての記述があり、3、5、6、9、10、11ピンで使えることが記述されてます。
3、5、6、9、10、11のいずれかと接続しましょう。

また、原サイトは英語なので、読める人はこっちを読みましょう。

回路完成の様子
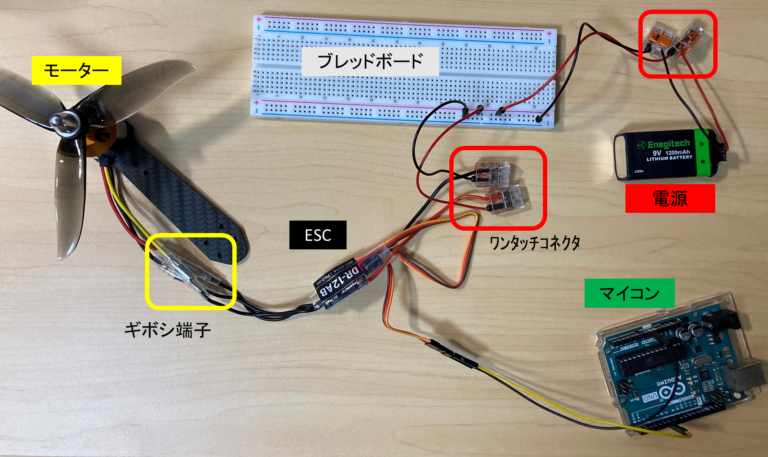
回路図と同じように配置した回路の写真を載せておきます。
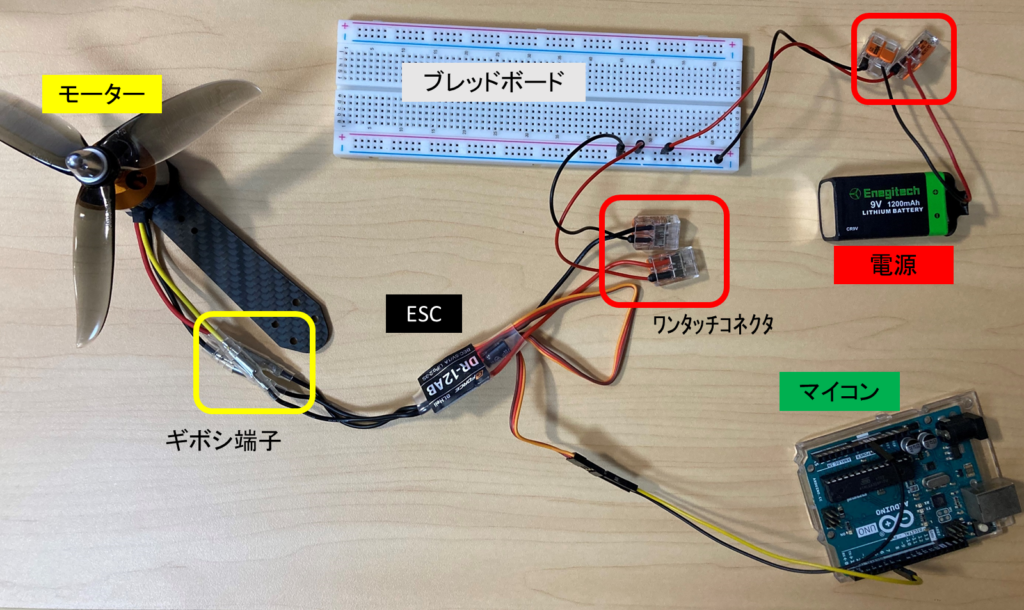
電源とESCの間にブレッドボードを挟んでいますが、これはスイッチとしての役割が必要だなと思って入れてます。今はジャンパーピンを差し込むだけですが。。。
次回について
次回ですが、今度こそ
- マイコンのPWM信号
- モーターの動作確認
この2点について書こうと思います。
以上。


コメント